Robô Talrik II ™
O robô Talrik II ™ concebido pela Mekatronix vem equipado com todo o material (mecânico e electrónico) necessário à sua montagem.
O Talrik II ™ é um robô versátil com muitas potencialidades permitindo assim uma grande variedade de aplicações.
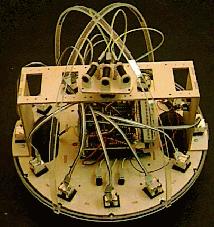
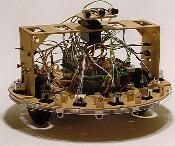
Figura 1 e Figura 2: Robô Talrik II ™
Estrutura Mecânica
A sua estrutura é fabricada em madeira prensada, resistente, leve e de grande durabilidade, com 3 mm de espessura.
Esta plataforma serve de suporte para os motores (modo de tracção), para as placas electrónicas, para as baterias e para todo o esquema sensorial (emissores e sensores).
As placas são protegidas por uma ponte que também serve de suporte a algum equipamento de comando, um servo e alguns sensores.
Como já foi dito a tracção do robô é efectuada através de 2 motores DC alimentados a 9.6 V. A rotação (velocidade) destes motores decresce com o abaixamento da tensão de alimentação.
Estrutura Electrónica
O Talrik II ™ do ponto de vista electrónico é composto por duas placas, uma controladora (contém o microcontrolador MC68HC11) e outra de aquisição sensorial, por vários sensores e actuadores.
O robô é constituído por 28 sensores: 12 sensores de infravermelhos, 10 sensores de choque e 6 fotoresistências.
Através destes sensores é possível efectuar uma grande variedade de aplicações.
Todo este equipamento é alimentado a partir de um conjunto de 8 pilhas Nickel-Cadmium recarregáveis de 1.2 V e 600 mAh cada.
Aquisição sensorial básica
Figura 3: Diagrama de blocos do Talrik II ™
Interruptores e indicadores de funcionamento
Placa Controladora MRC11
Esta é a placa que possui a base neural do robô - o microcontrolador MC68HC11, que controla todas as operações realizadas pelo robô.
Figura 5: Placa controladora do robô Talrik II ™
Características
Figura 6: Diagrama de blocos da placa controladora
O principal componente da placa MRC11 é o microcontrolador MC68HC11 da Motorola. Este dispositivo é que controla todas as acções executadas pelo robô, daí a se poder dar-lhe a designação "coração" do Talrik II ™.
A execução das instruções é sincronizado com o sistema de clock, realizado por um circuito externo ao microcontrolador que é constituído por um cristal.
O Talrik II ™ possui uma memória RAM de 64 Kbytes ( 2 chips de 32 Kbytes). Este tipo de memória permite a escrita e leitura de dados que são necessários para o funcionamento do robô.
Os dados armazenados na memória só se apagam quando as baterias se descarregarem ou se as desligarem, visto que as memórias continuam alimentadas através de um circuito alternativo mesmo quando o interruptor do Talrik II ™ deixa de estar ON.
O microcontrolador pode operar em quatro modos distintos. Estes modos são seleccionados através de dois pinos, MODA e MODB, presentes no MC68HC11.
MODA |
MODB |
Modo |
1 |
0 |
Normal simples |
1 |
1 |
Normal expandido |
0 |
0 |
Especial de carregamento |
0 |
1 |
Especial de teste |
Tabela 1: Modos de operação
No modo normal simples o microcontrolador funciona isoladamente, sem acesso à memória externa.
O modo normal expandido permite ao robô executar o programa carregado em memória. Neste modo já se tem acesso à memória externa.
O modo especial de carregamento permite ao utilizador carregar os programas para a memória RAM.
O modo especial de teste é utilizado para se efectuarem testes.
No Talrik II ™ apenas se tem acesso ao modo normal expandido e especial de carregamento.
Os modos normal simples e especial de teste são normalmente usados pelo fabricante para testar o microcontrolador.
A principal interrupção lógica do microcontrolador é o sinal de reset. Este sinal permite reinicializar o microcontrolador em duas situações distintas.
Uma delas corresponde ao reset manual, ou seja, quando se pressiona o botão de reset, a outra corresponde quando à situação em que a tensão de alimentação do microcontrolador desce abaixo dos 4.5 V, evitando assim o mau funcionamento do microcontrolador .
A função deste bloco é a de fornecer uma tensão fixa de 5 V independentemente das alterações ocorridas na tensão de entrada. Esta tensão é utilizada para alimentar toda a electrónica do Talrik II ™.
O oscilador é constituído por um cristal que gera uma onda quadrada de 8 MHz.
O microcontrolador utiliza este sinal para gerar um sinal de 2 MHz que é usado como referência temporal.
O bus I/O é constituído por vários sinais que permite a interligação de outras placas a esta placa (MRC11).
Placa de Expansão MRSX01
A principal função desta placa é a aquisição de dados fornecidos pelos sensores, tornando o Talrik II ™ um robô com uma grande capacidade sensorial.
Figura 7: Placa de aquisição sensorial do Talrik II ™
Características
Figura 8: Diagrama de blocos da placa MRSX01
É através destas entradas que se podem ligar todos os sensores do Talrik II ™, detectores IR, sensores de choque e fotoresistências. Esta placa também dispõe de algumas saídas para controlar os motores, os servos e os emissores IR.
Além destas o Talrik II ™ dispõe de mais entradas e saídas não utilizadas e que poderão ser usadas para expandir o robô.
Este circuito possibilita o carregamento das pilhas a partir de um carregador externo ao Talrik II ™ sem que seja necessário retirar as mesmas do robô.
A função deste bloco é a gerar um sinal quadrado de 40 kHz que irá ser utilizado para aplicar nos led´s de infravermelhos de modo a estes emitirem com a mesma frequência.
Como já foi dito é através deste Bus que a placa MRSX01 comunica com a placa MRC11.
Através deste Bus a placa MRC11 envia os sinais necessários para o controlo dos vários sensores, assim como a alimentação para os vários circuitos da placa MRSX01. Em contrapartida são enviadas as leituras efectuadas pelos sensores ao MC68HC11
Requerimentos energéticos
O Talrik II ™ vem preparado para ser alimentado por oito baterias NiCd de tamanho AA, em que o seu conjunto em carga nominal apresenta 9.6 V e descarregadas 7.2 V. Estas pilhas têm a capacidades de debitar 600 mAh.
Uma das desvantagens deste tipo de alimentação é que o carregamento das pilhas é muito moroso (cerca de 12 horas).
Estas baterias irão alimentar directamente os motores e irão alimentar toda a parte electrónica através de um regulador de 5 V.
De modo a que não hajam interferências por parte dos motores a alimentação destes é isoladas da restante electrónica, tanto pelo regulador de tensão como pela ponte em H.
Figura 9: Esquema geral da alimentação do Talrik II ™