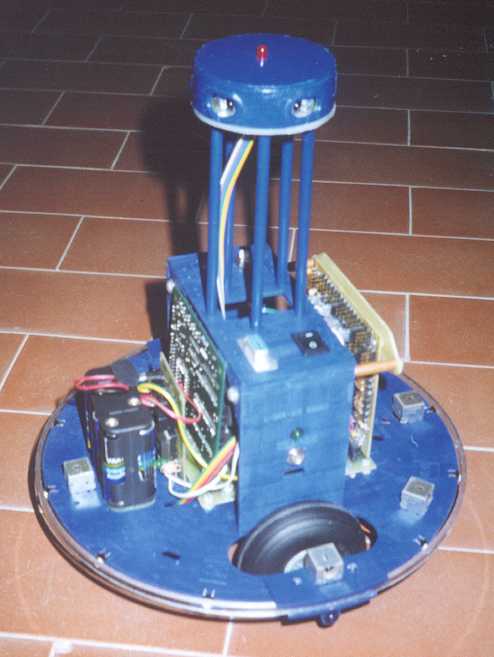
Robô Blue T
Como um dos objectivos do projecto era o seguimento do farol (fonte de luz IR), o desvio e contorno de obstáculos e ainda uma possível participação num concurso de robôs decorrente em Aveiro, foram feitas algumas alterações partindo da plataforma do robô Talrik II ™.
Além destas alterações ainda foram efectuadas alterações de beneficiação do robô.
A esta nova versão do robô foi dado o nome de Blue T.
Detectores de infravermelhos
Detectores do farol
O farol é constituído por 12 led´s de infravermelhos distribuídos uniformemente em forma circular com 5 cm de diâmetro a uma altura de 28 cm, emitindo uma radiação infravermelha com um comprimento de onda de 940 nm modulada a 32 kHz.
Como um dos objectivos é o seguimento do farol foi montado no robô uma torre constituída por 5 detectores de infravermelhos de 32.75 kHz de modo a que o robô se dirija ao farol.
Esta torre encontra-se a uma altura de 28 cm visto que é a altura a que se encontram os led´s emissores do farol.
Detectores de obstáculos
Originalmente o robô vem munido com 12 detectores IR de 40 kHz, só que visto que não eram necessários tantos IRDT's, já que alguns eram poucos usados, estes foram reduzidos para 6.
Disposição dos detectores
A figura 11 mostra a disposição dos sensores de infravermelhos colocados no robô Blue T.
Figura 11: Disposição dos detectores de infravermelhos no robô Blue T
Sensores de entrada no círculo de chegada
Estes sensores foram criados para detectarem quando o robô entra na área de chegada, que é preenchida por um círculo de 50 cm de raio e material preto, que contém um baixo coeficiente de reflexão de luz, enquanto que o resto da área de jogo é branca, com um coeficiente de reflexão elevada.
Foram usados dois sensores, um à frente e outro a trás, visto que o robô tem que ficar completamente dentro da área de chegada, o que com um só sensor seria extremamente difícil conseguir tal condição, além disso o robô poderia parar se passasse por uma zona mais escura (nódoa).
Sendo assim o robô só pára quando os dois sensores detectarem a zona mais escura, ou seja, a área de chegada.
De seguida apresenta-se o esquema dos sensores desenvolvidos para este fim.
Figura 12: Esquema dos sensores de fim de prova
Os led´s de luz visível estão colocados em forma de quadrado com a fotoresistência no centro.
Sabe-se quando o robô entra na área de chegada visto que como o coeficiente de reflexão é diferente, a fotoresistência vai detectar menos luz reflectida do que na restante zona de jogo.
Chão branco - Vout a 5 V ; Chão preto - Vout a 0 V
As saídas dos sensores Vout vão ser lidas pela entrada Analog[1] e Analog[2].
Led fim de prova
A condição para a prova do concurso se dar como terminada além, claro, de entrar na área de chegada é a de acender uma luz que sinalize o fim da prova.
Para esse fim foi usado um led que é activado através do software pelo sinal OUT1. Este led, como é lógico, só é aceso depois do robô entrar na área de chegada, ou seja, quando os sensores de entrada no circulo de chegada enviarem o sinal correspondente a chão preto e depois dos motores pararem.
Figura 13: Esquema de ligação do led fim de prova
Botões de arranque e paragem
Foram acrescentados no robô dois botões de pressão, um permite o arranque e o outro quando pressionado pára o robô.
Sendo assim o robô pára sempre quando for pressionado o botão de paragem. Para o colocar de novo em movimento será necessário pressionar o botão de arranque.
O uso destes botões não interfere com o programa que está a decorrer.
O esquema para realizar esta operação, ao qual se deu o nome de arranque-paragem, foi efectuado por uns colegas nossos de Coimbra, em que os botões apenas vão interromper ou não os sinais que vão controlar o motor.
Figura 14: Esquema dos botões de arranque e de paragem
De seguida apresenta-se as tabelas de verdade do esquema (tabela 2) bem como os sinais (figura 15) que aparecem nos principais pontos deste circuito.
Start |
Stop |
D |
0 0 1 1 |
0 1 0 1 |
Inverte 1 0 mantém |
D |
CLK |
Q |
0 1 |
|
0 1 |
Q |
PA5in |
PA5out |
Q |
PA6in |
PA6out |
|
0 0 1 1 |
0 1 0 1 |
0 0 0 1 |
0 0 1 1 |
0 1 0 1 |
0 0 0 1 |
Tabela 2: Tabelas de verdade do circuito
Figura 15: Principais sinais no circuito arranque-paragem
Conversão de detectores de infravermelhos e servos
Como para se movimentar o robô são necessários 2 motores DC e só se possuía servos, retirou-se então a estes o batente da engrenagem nº5, toda a electrónica e soldou-se o cabo de alimentação dos motores directamente aos motores (antes estava ligado à placa com o potenciómetro e restante electrónica) de modo a que estes rodem livremente obtendo-se assim os motores DC.
Uma das outras alterações foi efectuada nos detectores IR que vinham preparados com uma saída digital. Realizou-se então a conversão da saída digital para saída analógica de modo a que se tenha uma ideia da distância do robô aos obstáculos.
Circuito de alimentação
De modo a melhorar a alimentação da parte electrónica do robô, principalmente a autonomia, foi montado no robô um conversor DC/DC.
Neste caso foi utilizado um CI LM2825-5.0, o qual contém um conversor DC/DC completo e que fornece uma tensão fixa de 5 V independentemente das variações de tensão de entrada e além disso isola a parte electrónica das interferências causadas pelos motores.
Nota: O circuito de carga das pilhas já está implementado na placa MRSX01.
Perto do conversor são utilizados condensadores para eliminar o ruído de altas frequências, ou seja, para eliminar os transitórios que possam aparecer à entrada.
A bobine e o condensador montados à saída do conversor formam um circuito que filtra a tensão de ripple de modo a que os 5 V sejam constantes.
Este CI está munido de um pino chamado "soft-start" que é utilizado para se realizar um arranque suave, ou seja, de modo a que quando se coloca o conversor em carga a corrente de saída comece a subir de forma controlada e suave a partir de um nível mais baixo. Para isto é somente necessário ligar um condensador entre esse pino e a massa.
Foram ainda instalados dois fusíveis, um para proteger os motores e outro para proteger a parte electrónica para o caso de ocorrerem sobrecargas.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}